June 26, 2017 ~ Present
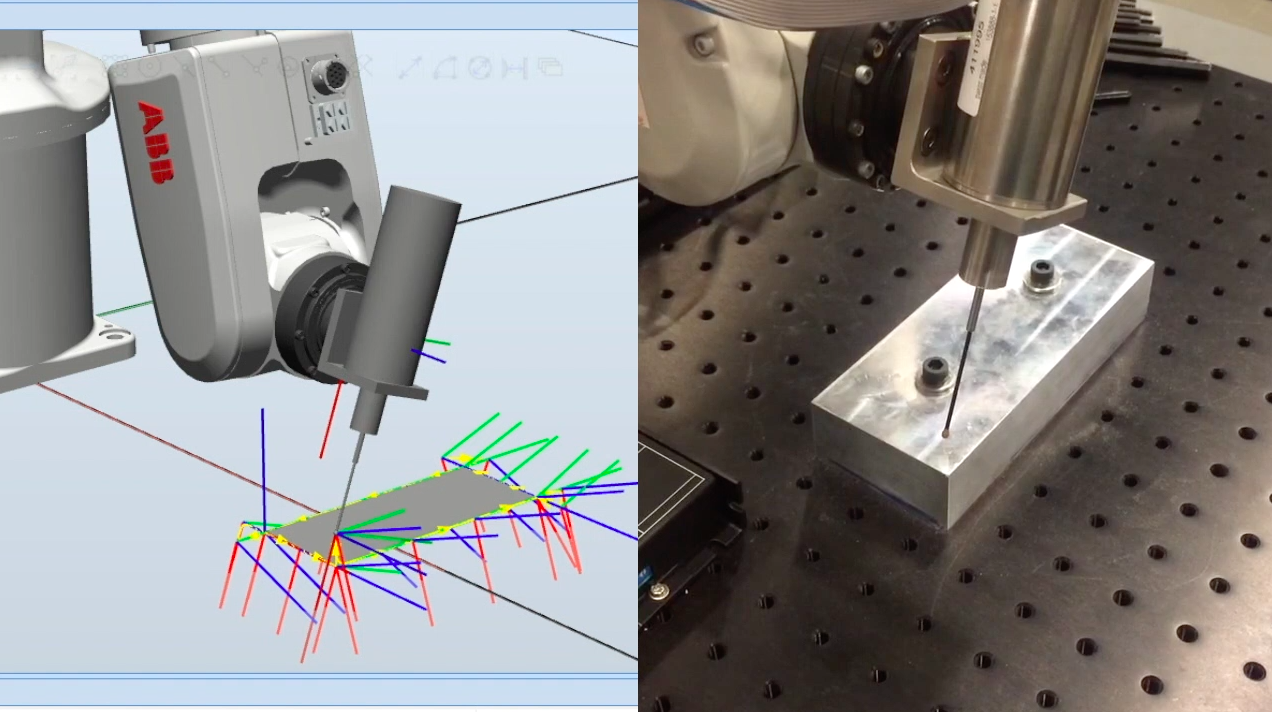
We are designing a 3-D trajectory-generation plan with an industry robot and a controller for a spindle end effector attached with brush, to serve the purpose of cleaning a mechanical gear usd by the airplane.
 December, 2014 ~ May, 2016
December, 2014 ~ May, 2016
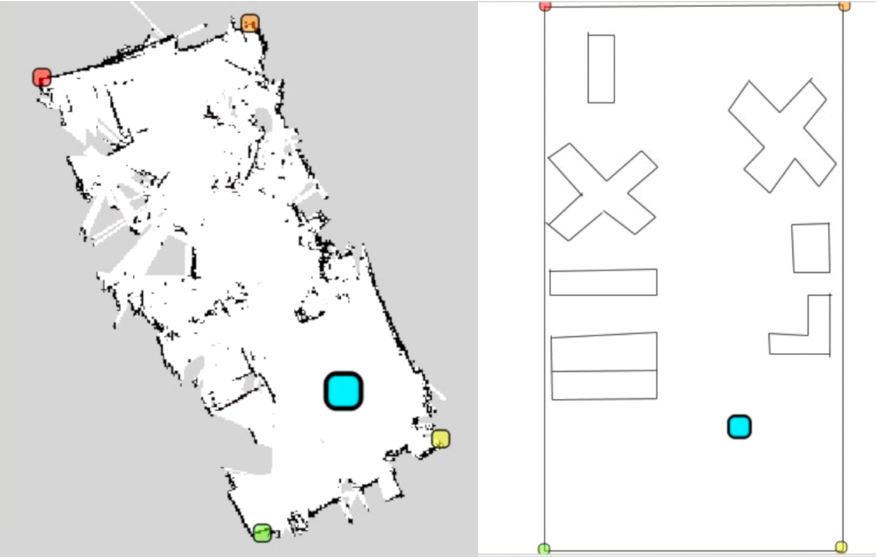
We created and presented a simple algorithm for quickly laying a floor plan (or other conceptual map) on to a SLAM (Simultaneous Localization And Mapping) map, creating a one-to-one mapping between them.
March 25, 2017 ~ June 17, 2017
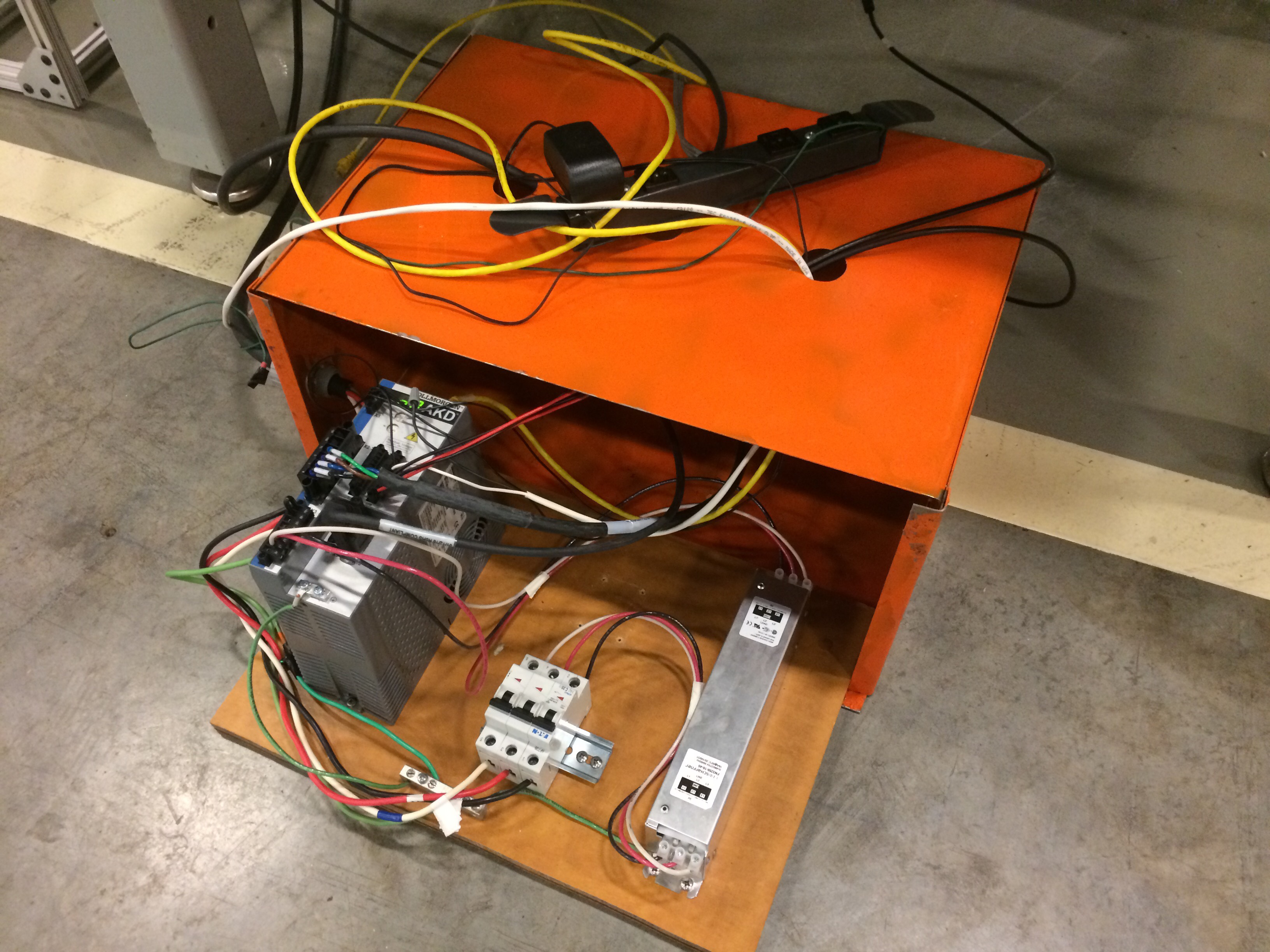
I built up an electrical box for a CNC table from scratch, to serve the purpose of providing purified electricities and programmable signals for the motor, which drives the CNC table.
September 8, 2016 ~ March 17, 2017
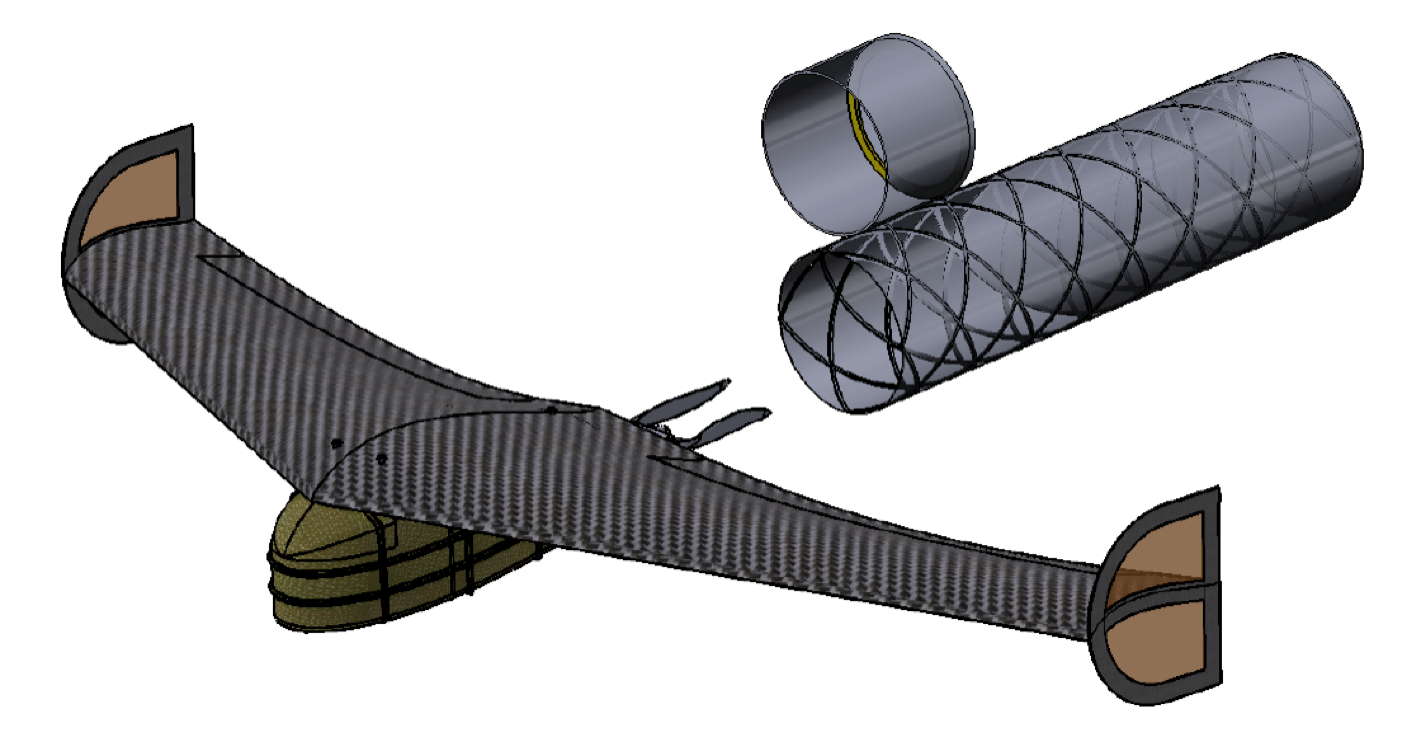
Our team has designed an unmanned aerial vehicle (UAV) capable of carrying a payload as large as three hockey pucks and a protective tube for it to be stowed in.
June, 2016 ~ March 22, 2017

The purpose of this project is to design an ice battery that stores the electrical energy at night and releases the stored energy at day time.

The purpose of this project is to design and machine a part on a CNC machine. The design includes three steps: Design geometry with the SolidWorks, define and gain the locations of points and generate NC codes.
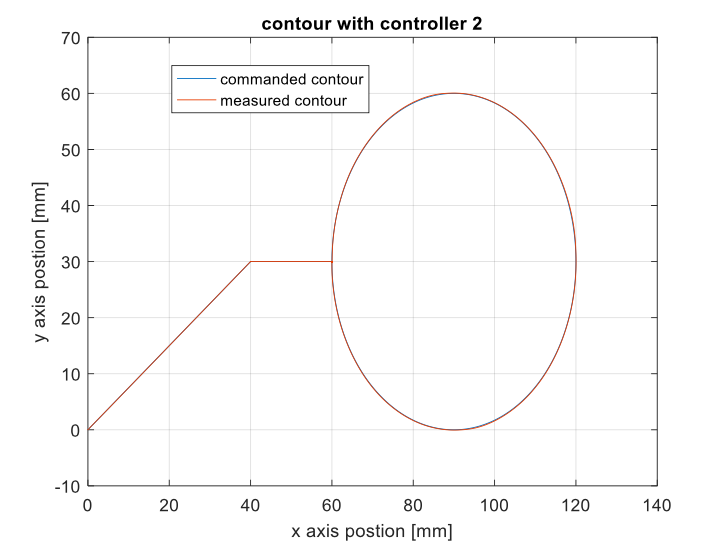
In industry, it is very important to achieve the multi-axis control both effectively and accurately for any arbitrary contour command. This project involves the coordinated motion generation, and controller design for a two degree of freedom system.
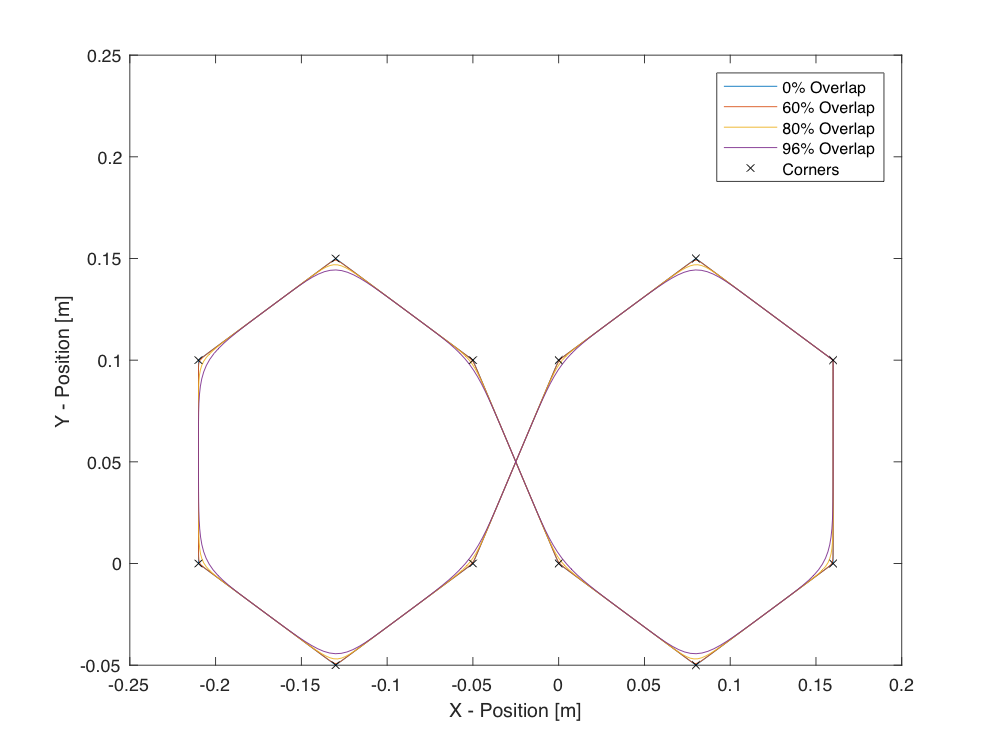
This project is to repeat a new path-plan method demonstrated in the paper, and compare the results with the ones of commonly-used trapezoidal velocity method.